Spesso c’è la necessità di comandare due o più motori da un unico punto di comando, la tentazione di collegare i motori in parallelo è veramente irresistibile.
Purtroppo i motori tubolari integrano al loro interno un condensatore e i finecorsa di salita e discesa.
Questa loro particolare costruzione non permette il collegamento dei motori tubolari della serie M in parallelo.
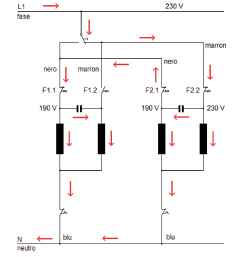
Come si può vedere dalla fig.1, una volta chiuso il deviatore verso destra, la corrente elettrica scorre attraverso i finecorsa F1.2 e F2.2 rispettivamente nei due motori che girano normalmente.
Si nota subito che la corrente che attraversa il condensatore provoca ai suoi capi una caduta di tensione di c.a. 40 V (in funzione del tipo di motore e della coppia in quel momento erogata), quindi la tensione sotto i finecorsa F1.1 e F2.1 assume rispetto al neutro un valore intorno a 190 V. Ciò è ben noto a tutti gli installatori che alimentano i motori, senza il cavo prova. Inserendo infatti direttamente i due fili (per es. blu e marron) sulla presa, molto spesso prendono la scossa sul terzo filo che rimane scoperto. Ciò dipende anche dal fatto che ogni finecorsa rimane chiuso durante il funzionamento della marcia contraria e quindi mantiene in tensione il rispettivo conduttore a cui è collegato.
Supponiamo ora che il motore sinistro si arresti perché viene raggiunto il punto memorizzato dal finecorsa F1.2 che si apre, mentre il motore destro continua a girare.
A questo punto, come indicato nella fig.2, il finecorsa F2.1 alimenta il motore sinistro nel senso contrario, attraverso il finecorsa F1.1 con la tensione ridotta a c.a. 190 V che è comunque sufficiente a riavviare il motore in senso opposto.
Appena ripartito il motore sinistro si allontana dal finecorsa F1.2 che si richiude riportando la tensione di 230 V sulla bobina ad esso collegata che prevalendo sui 190 V dell’altro lato fa invertire nuovamente la rotazione del motore finché si riaprirà un’altra volta F1.2.
Il motore sinistro continuerà a ad invertire il senso di rotazione a brevi intervalli, finché il motore di destra non avrà raggiunto anche lui il finecorsa F2.2.
Questa situazione di continui cambi di rotazione provoca nel tempo danni irriparabili nei motori.
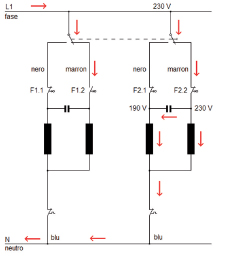
(Lo schema di fig.3 propone una separazione galvanica tra i due motori realizzata con un doppio deviatore a zero centrale con sei morsetti.)
Come si vede il finecorsa F2.1 non può alimentare il motore sinistro perché il collegamento è interrotto dal deviatore. Il motore sinistro dopo aver aperto il finecorsa F1.2 si arresta in modo definitivo.
Al posto del doppio deviatore sono disponibili sul catalogo i moduli
DK-CX2 o DK-CP1 che provvedono a comandare contemporaneamente più motori separandoli fra di loro.
In alternativa, i motori con finecorsa meccanico della serie MP sono stati studiati appositamente per il collegamento in parallelo.

 Italiano
Italiano English
English